
 Antoine Kaufmann
—
Thu, Jun 20, 2024
Antoine Kaufmann
—
Thu, Jun 20, 2024
SimBricks enables users to simulate complex hardware-software systems comprising potentially many different components. To this end, SimBricks combines and connects different best-of-breed simulators into a modular simulation that reflects the structure of the simulated system. Integrating a broad range of different and potentially incompatible simulators, keeping simulation times low even for large-scale systems, generating meaningful performance results, and making it easy for users to configure and run complex simulations, are significant challenges. This post provides a first overview of our core technical pieces and how they fit together, while future posts will dig into individual components in much more detail.
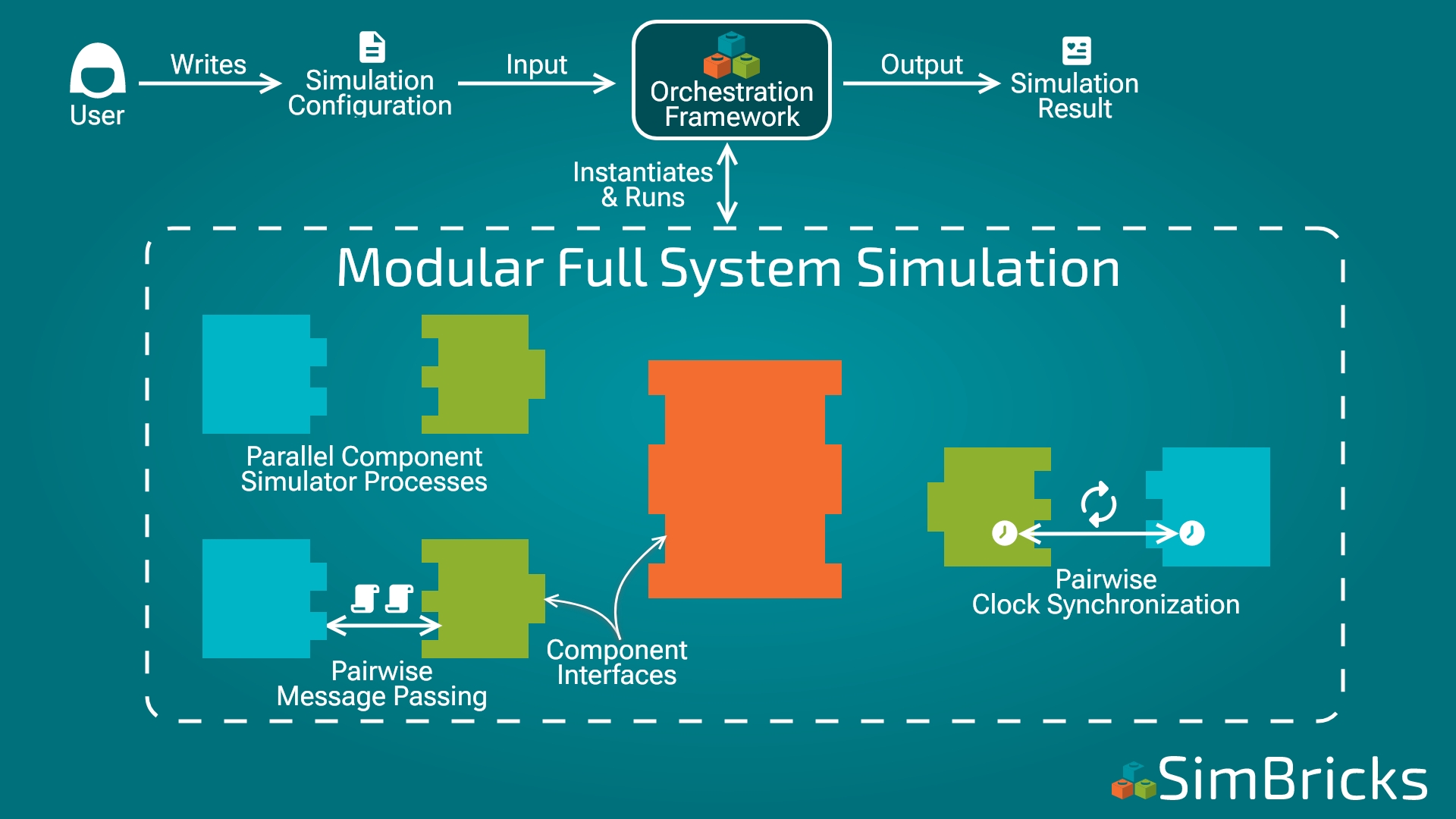
Natural Component Interfaces for Modularity
When building hardware-software systems, we fundamentally rely on modularity at component boundaries to manage complexity. For example, a PCIe device can connect to any machine with PCIe, and a modern Ethernet device does not need to know what component it connects to. We apply the same idea for simulating complex systems: the structure of the simulation corresponds to the structure of the simulated system, and we interface different component simulators at natural interfaces for the physical system. Two common SimBricks interfaces are PCIe and Ethernet. A PCIe device simulator can connect any simulator implementing the PCIe host interface. An adapter for a SimBricks interface only has to be implemented once when initially integrating the simulator. This enables the modular “Lego” combination and swapping of components.
Component Simulators as Separate & Parallel Processes
To make it easy to integrate independently implemented simulators, potentially in different programming languages and with incompatible simulation modes, SimBricks runs individual component simulators as separate independent processes. As a result, integrating a simulator into SimBricks only requires the developer to add adapters for the specific interfaces, and to match these up with that simulator’s internal abstractions, but no complicated structural changes are needed. This reduces the complexity of integration to each simulator ensuring compatibility with the SimBricks interface, rather than with all other simulators.
Running component simulators as separate processes also trivially enables parallelism between components. A system with more components thus requires additional processor resources but does not increase simulation time significantly.
Efficient Message-Passing
The independent component simulator processes of course need to communicate. To retain loose coupling, we implement this through message-passing. For efficiency and scalability, SimBricks relies on pairwise message-passing channels between simulators that simulate connected system components. Most component simulators thus only directly communicate with one or two peers, e.g. a machine might have one or two PCIe devices, a PCIe NIC connects to the host on one port, and the network on another, etc.
Message transfers are also on the critical path, and have the potential to slow down already slow simulators. To minimize message transfer overhead, we rely on polled shared memory queues. As long as simulators run on separate cores, this enables cheap and low-latency message transfers without kernel involvement. We will discuss the details and implications in much more detail in a future post.
Accurate & Scalable Synchronization
Once simulators can communicate at component interfaces to exchange data, we can run functionally correct and efficient full system simulations. However, these simulations do not produce meaningful performance measurements, as each simulator process has its local simulator clock advancing at an independent pace. In general, meaningful performance results require synchronized clocks across all component simulators. Achieving this efficiently and at scale is a challenge.
SimBricks addresses this with synchronization inlined with message transfers by tagging messages with timestamps. We only synchronize communicating peer simulators — correctness only requires that each simulator process incoming messages at the correct time. A message with a particular timestamp is a promise that no older messages will arrive on that channel, and thus the simulator can safely advance to that time. A modeled interface delay creates wiggle room critical for performance, simulators do not need to operate in perfect lock-step. Dummy messages ensure progress when no data messages are exchanged. This combination enables efficient and scalable synchronization without sacrificing accuracy.
Orchestration Framework: Assembling Bricks
Manually starting and running such a simulation with many pieces, is prohibitively complicated and laborious. SimBricks automates this with our orchestration framework, the main means for users to interact with SimBricks and our simulations. The orchestration framework, allows users to specify simulation configurations as Python scripts, typically 10-200 lines. The framework then fully automatically configures and runs all simulators. Moreover, the simulation configurations can leverage pre-configured components, enabling reuse and avoiding the need for each user to understand each simulator configuration in-depth.
We look forward to covering these pieces in more detail in future posts. Until then:


